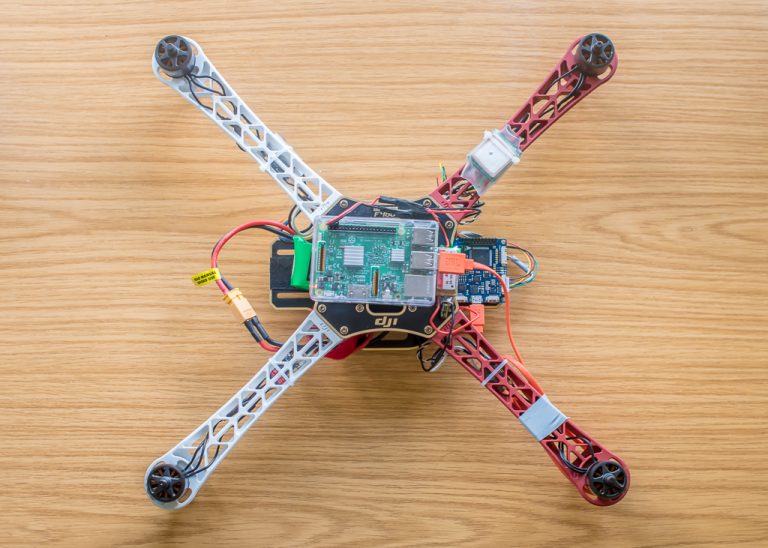
My final year project at uni was producing an autonomous drone, which positions itself to give the best signal to users connected to the WiFi hotspot it creates. Imagine this use case:
At a festival, there are multiple people connected to a WiFi hotspot - usually these are at static points around the site. With this system, as the users walk around the festival site, the drone(s) would track their movement to provide the best signal to the most users.
It could also be used for search & rescue or for communities isolated after natural disasters, such as the flooding in Puerto Rico.
Demo
I built this simple simulation which models how the drone (the purple triangle) would track the user (the pink cuboid) and predict its location (the blue cuboid).
You can move the user round using the arrow keys and move the camera using the mouse (use scroll wheel click and drag to change the angle).
Works best on desktop
Received Signal Strength (RSS)
One of the main benefits of this system is that there is no proprietary app on the devices connected to the hotspot; the hotspot is created by the Raspberry Pi which controls the drone. To work out where the user is, the drone takes measurements of the Received Signal Strength (RSS):
Received Signal Strength (RSS) is a measurement of the power of the received signal at a device, which is typically measured between 0dBm and -100dBm; for WiFi, typical values range between -30dBm to -90dBm.
Section 2.4.2 of the report
These RSS measurements are then converted into a distance away from the drone and trilaterated to give a position for the user. Of course there's a bit of noise and inaccuracy, as simulated and shown in the demo.

Future Work
This project was a proof-of-concept using a single drone to work out the viability of a system like this and algorithms involved. It is definitely possible, as the report shows, and there are various improvements that could be made, such as using a fleet of drones, adding sensors and more remote controls. I'm pleased to say that the university are continuing research into the project and future students are working on the drone.