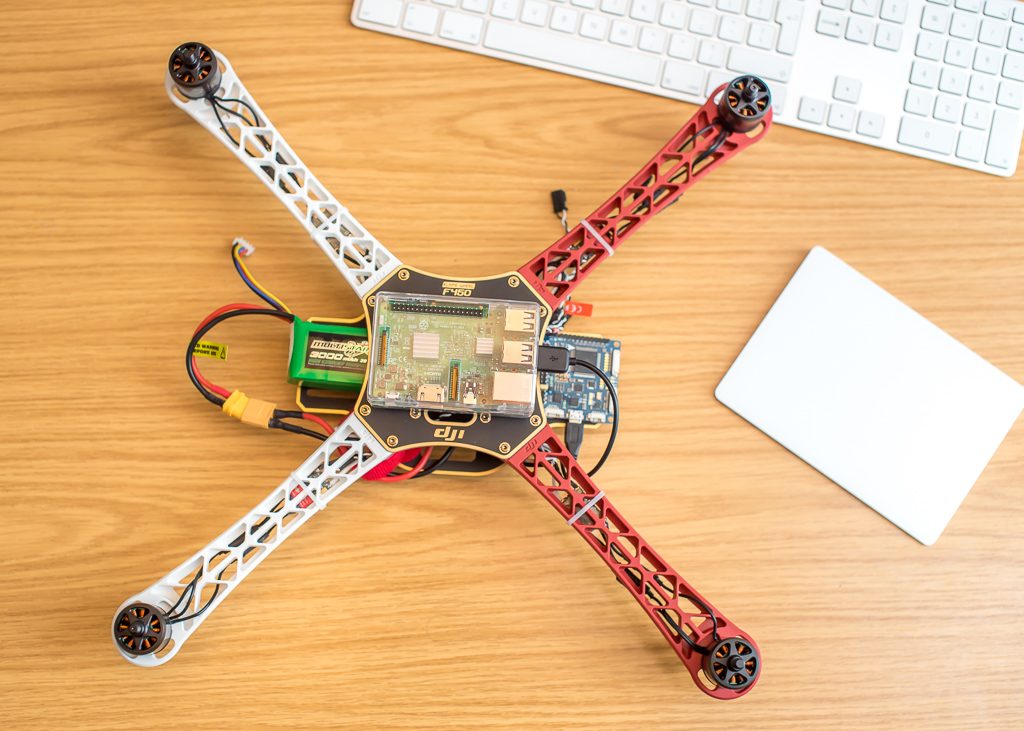
In the month since last posting about my final year project, lots has happened - like Christmas, but I have made some progress on various aspects of this project. Just to recap, the aim is to have an autonomous drone that works as a WiFi router and positions itself to give the best signal to the users.
The drone is almost at a stage where it could fly, there just needs to be power to the Pi and it should all work...